Autonomous Delivery Fleet Management
KINETIC Fleet OS
Концептуальная SaaS-платформа для управления парком автономных роботов-доставщиков. Система объединяет мониторинг флота, телеметрию, удалённое управление и сервисные инструменты в единую операционную среду.
О проекте
В крупных городах, таких как Дубай, возникает потребность в новых форматах быстрой доставки. Высокая плотность застройки, постоянный рост онлайн-заказов и дорогая человеческая логистика делают автономных роботов-доставщиков экономически выгодным решением.
KINETIC Fleet OS — это концепт продуктовой платформы для управления парком автономных роботов-доставщиков, предназначенных для городской доставки, например доставки пиццы. Проект показывает, как может выглядеть единая продуктовая среда для операторов и инженеров, работающих с парком роботов на линии.
В центре кейса не только визуальная часть, но и операционная логика: как система обнаруживает инцидент, выделяет проблемный юнит, показывает телеметрию и помогает оператору принять решение без лишних переходов.
В центре кейса не только визуальная часть, но и операционная логика: как система обнаруживает инцидент, выделяет проблемный юнит, показывает телеметрию и помогает оператору принять решение без лишних переходов.

Ровер робот-доставщик · Схема робота ровера версии модели UR-4
Цель проекта
Спроектировать понятную и масштабируемую систему, в которой оператор может быстро оценить состояние флота, локализовать инцидент и перейти к действию без визуального перегруза.
Fleet visibility
Показать весь парк на карте в реальном времени и дать возможность за секунды понять, где всё нормально, а где требуется внимание.
Показать весь парк на карте в реальном времени и дать возможность за секунды понять, где всё нормально, а где требуется внимание.
Fast response
Свести сценарий реагирования к понятной цепочке: alert → robot card → live camera → action.
Свести сценарий реагирования к понятной цепочке: alert → robot card → live camera → action.
Unified system
Собрать мониторинг, телеметрию, диагностику и сервисные действия в единую продуктовую архитектуру.
Собрать мониторинг, телеметрию, диагностику и сервисные действия в единую продуктовую архитектуру.

Ровер в городской среде
Платформы
Продукт разделён на web-часть для диспетчерского центра и mobile-инструменты для полевых инженеров — без смешения сценариев мониторинга и обслуживания в одном интерфейсе.
Web Dashboard
- Global Dashboard — карта всего флота в режиме реального времени.
- Teleoperation Mode — удалённое управление в сложных ситуациях.
- Analytics — статистика доставок, маршрутов и инцидентов.
Mobile Technician App
- QR identification — быстрая идентификация робота.
- Diagnostics — проверка систем на месте.
- Direct actions — разблокировка колёс, сервисный режим, базовые команды.
- Navigation — маршрут до проблемного юнита.
Иконка мобильного приложения.
Проблема и решение
Простая карта уже не решает задачу, когда парк роботов растёт. Нужны статусы, телеметрия, live camera feed и действия, доступные прямо в контексте инцидента.
Проблема: при увеличении количества роботов оператору становится сложно быстро понимать приоритеты и принимать решение только по карте и списку статусов.
Решение: система строится как три уровня:
Решение: система строится как три уровня:
- Fleet Overview — общий контроль всех роботов на карте.
- Robot Detail — карточка выбранного ровера с телеметрией и камерой.
- Incident Mode — быстрый вход в сценарий реагирования и перехват управления.
Пользователи:
- Dispatch operators — следят за флотом и реагируют на отклонения.
- Teleoperation operators — подключаются к роботу и берут ручное управление.
- Field technicians — обслуживают роботов на месте и выполняют сервисные действия.
Основной сценарий
Один из ключевых сценариев — ситуация, когда робот встречает физическое препятствие и не может продолжать движение в autopilot mode.

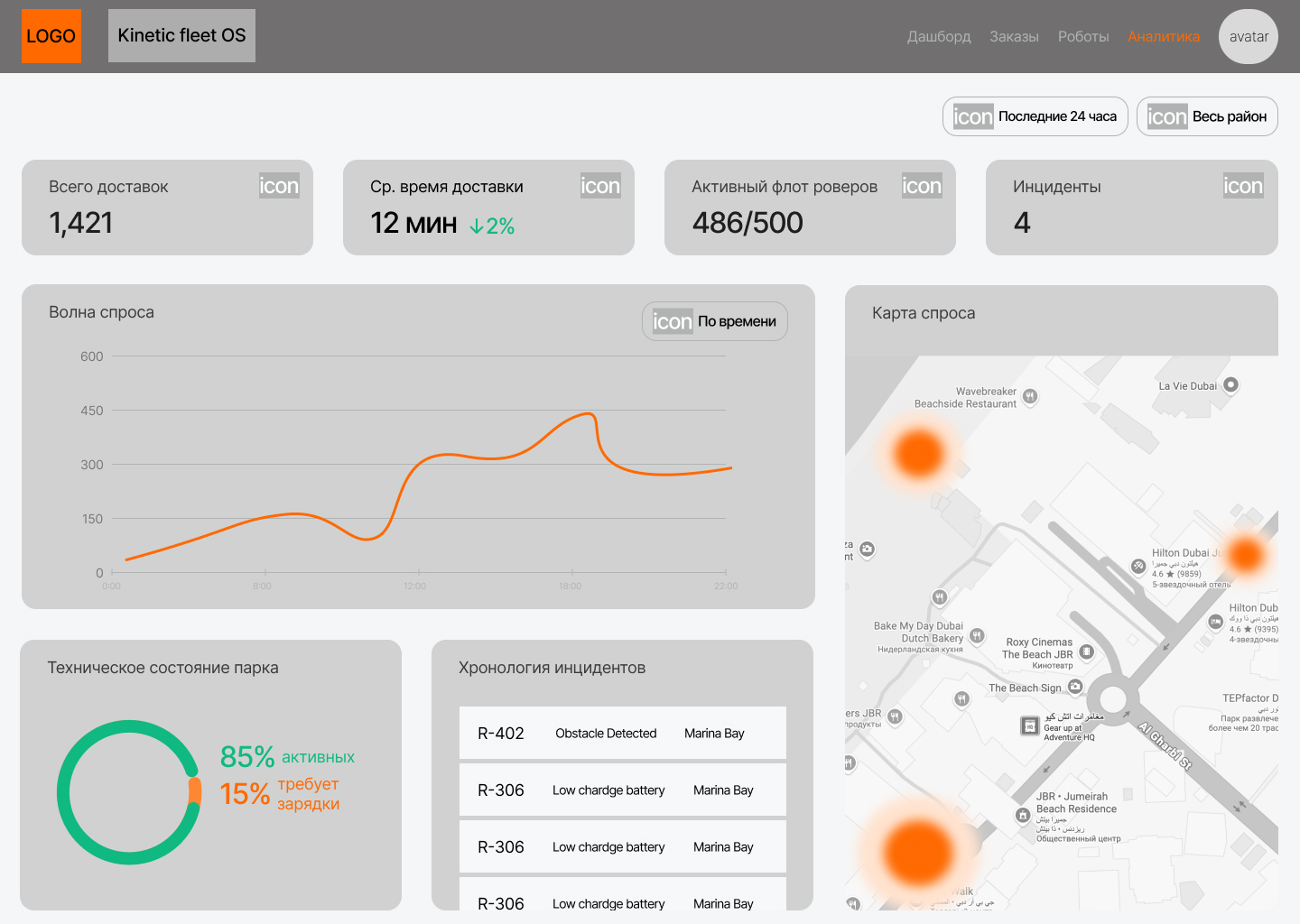
Fleet overview · карта флота с активными юнитами и статусами

Robot UR-4 · вид предполагаемого препятствия, где может потребоваться помощь оператора

Incident state · карта показывает уведомление о препятствии на дороге ровера

Карточка ровера · карточка робота с телеметрией и техническими параметрами

Вид из камеры ровера · оператор управляет роботом в режиме реального времени

Карточка ровера в режиме автопилота · когда нет проблем, ровер продолжает работать в autopilot mode
Wireframe
На этом этапе я собрал базовую логику экранов и проверил, как оператор проходит путь от общего обзора флота к конкретному роботу, инциденту и нужному действию. Wireframe помог зафиксировать структуру до финальной визуальной системы.
Зачем нужен этот блок: wireframe показывает не декоративную часть интерфейса, а порядок действий, иерархию данных и то, как система помогает оператору быстро ориентироваться в сложной ситуации.
Что здесь проверялось:
Что здесь проверялось:
- как выглядит главный обзор fleet map до визуальной детализации;
- какие данные критичны в карточке робота;
- как строится переход к incident state и remote control;
- насколько понятны статусы, CTA и логика приоритизации.
Этот блок показывает переход от логики и структуры к финальному визуальному решению интерфейса.

Wireframe overview · общий системный лист, на котором видно базовую архитектуру экранов и связи между ними
Wireframe 01 · схема дашборда

Готовый экран · дашборд стал структурнее и читабельнее

Wireframe 02 · схема экранного сценария

Готовый экран · законченный экран, где на 80% увеличена область покрытия карты
UI Kit
Интерфейс построен в стиле Clean Industrial: светлая тема, уверенная иерархия, минимальный шум и акцент на статусах, карте и действиях оператора.
Цвета
Оранжевый отвечает за акценты и действия, графит формирует навигационный слой, а нейтральная светлая база поддерживает читаемость карты и карточек.
Оранжевый отвечает за акценты и действия, графит формирует навигационный слой, а нейтральная светлая база поддерживает читаемость карты и карточек.
Background#F6F7F9
Surface#FFFFFF
Accent#FF6B00
Graphite#2E3137
Success#49B44A
Error#E45B47
Типографика
Связка Exo 2 и Inter помогает удерживать баланс между технологичной эстетикой и спокойной читаемостью в плотных операционных блоках.
Связка Exo 2 и Inter помогает удерживать баланс между технологичной эстетикой и спокойной читаемостью в плотных операционных блоках.
Exo 2 / Inter
Заголовки, robot IDs и KPI держатся на Exo 2. Более длинные описания, labels и значения в telemetry blocks — на Inter.

Экран авторизации · welcome и authentication states

Экран загрузки системы · веб-интерфейс и мобильная версия
KPI
Концепт-метрики, которые показывают ценность решения: скорость реакции, прозрачность состояния флота и понятность операторского сценария.
Реагирование на инцидентыболее быстрое принятие решений
78%
Видимость флотаобзор в реальном времени
84%
Уверенность операторачёткая системная иерархия
73%
Готовность к обслуживаниюединая поддержка
69%
Роверы в городской среде
Этот блок связывает интерфейс KINETIC Fleet OS с реальным устройством и городской доставкой. Здесь показано, как ровер выглядит в живой среде, перемещается по маршруту и участвует в сценарии загрузки заказа.

Загрузка пиццы в ровер · большой отсек для Dodo Pizza 32 см. Сценарий, где заказ загружается в ровер перед стартом автономной доставки

Роверы на дороге · ровер соблюдает правила дорожного движения и движется по городскому маршруту как часть delivery-системы
Почему этот раздел важен: он делает кейс убедительнее и показывает, что продукт продуман не только как digital dashboard, но и как часть целой delivery-экосистемы, связанной с физическим устройством.
Что он усиливает:
Что он усиливает:
- связь между интерфейсом управления и physical device;
- понимание полного сценария «от загрузки до движения по маршруту»;
- восприятие проекта как более зрелого robotics product concept.
Логика продукта:
- Loading state — заказ помещается в ровер в точке отправки;
- Route execution — ровер движется по маршруту в городской среде;
- Fleet OS monitoring — оператор видит маршрут, статус и состояние юнита в реальном времени;
- Incident response — при проблеме система позволяет быстро подключиться и принять решение.
Итог
KINETIC Fleet OS — сильный концепт продуктовой системы, который показывает не только визуальную подачу, но и продуманную логику работы с fleet monitoring, incident states и teleoperation flow.
• Enterprise logic: система ощущается как реальный операционный инструмент.
• Scenario thinking: показаны не только happy paths, но и критические состояния.
• Visual restraint: интерфейс остаётся лёгким и читаемым даже при плотных данных.
• Portfolio value: кейс демонстрирует продуктовый подход в сложной domain-зоне.

Poster